My research interests are in connected autonomous vehicles (CAVs), reinforcement learning, computer vision, and deep learning. My research focuses on the autonomous driving problem from a cooperative and multi-agent point of view. I study the autonomous driving problem in mixed-autonomy environments, where autonomous agents can interact with each other and with humans. My research goal is to make advances in reinforcement learning and self-supervised learning , which I believe is the one of the biggest scientific hurdles for AI and autonomous agents.
Studying the autonomous driving problem as a single agent and as a multiagent problem from a cooperative point of view in the presence of humans. Tackling the problem of autonomous driving in complex & competitive mixed-autonomy environments, where autonomous agents can interact with each other and with humans
Studying Driver Behavior Modeling to predict driving maneuvers, driver intent, and vehicle state to improve transportation safety and the driving experience. Taking advantage of vehicle-to-vehicle (V2V) communication.
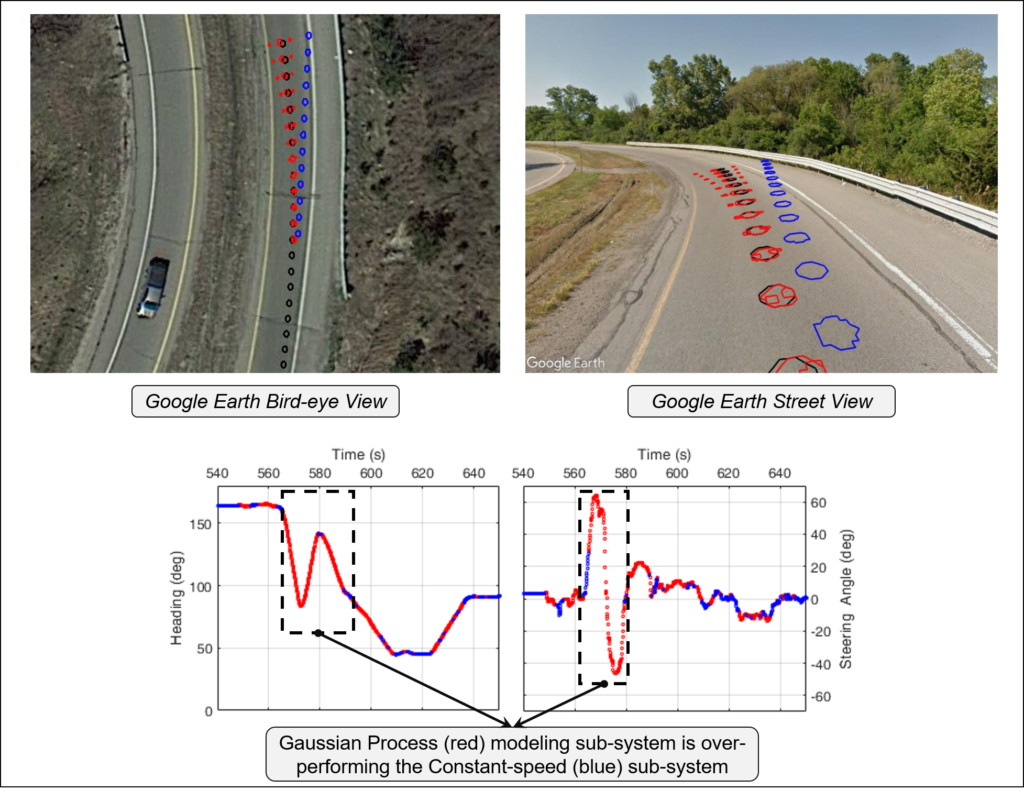
Studying the data recorded from vehicles driven by humans reveals that a human driver’s behavior consists of certain patterns and micro-maneuvers. Extracting abstract models of these micro-maneuvers enables us to reliably predict the motion and dynamics of human-driven vehicles.
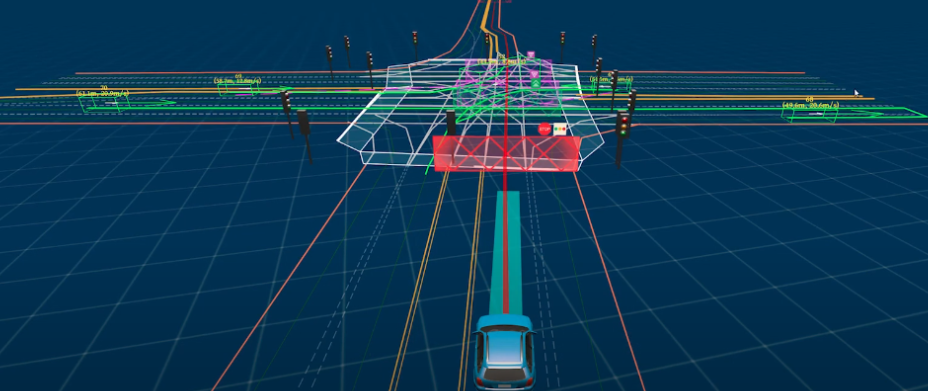
Test platform for research on connected and autonomous vehicles (CAVs). We built a fleet of 1/5 & 1/10 scale vehicles equipped with LiDAR, stereo camera, and an on-board NVIDIA Jetson TX2 computer. The SCVP vehicles are able to reach and maneuver at 60mph speed, making them a realistic testbed for CAV applications. I was responsible for hardware design and software implementation, developing the autonomous driving software stack, and mentoring the team.